
- 汎用型ロボット手術支援システム(SmartArm)に関する研究
- 安全性向上のためVirtual Fixture(Vector-field-inequalities)の手術空間への応用に関する研究
- 顕微鏡下脳神経外科手術用ロボティック・システムに関する研究
- 眼科手術用ロボティック・システムに
する研究
- ロボット手術のバーチャルリアリティ(VR)シミュレーションに
関する研究
- 人工膝関節置換手術支援システムに
関する研究
- 顕微鏡下手術を対象とした熟練度評価
システムに関する研究
- 操作性を考慮した小児内視鏡下手術用
多自由度術具に関する研究
- 遠隔腹腔鏡下手術支援システムに関する研究
- 過去のテーマ
- 非侵襲超音波診断・治療統合システムに関する研究
- 生体適合型骨切除デバイスに関する研究
- 微細加工技術を用いた工具表面の機能化に関する研究
- 硬脆材料の精密加工に関する研究
- 物理的特性に基づく再生軟骨の評価法
に関する研究
- 骨折整復手術支援システムに関する研究
- 手の外科手術支援システムに関する研究
- 超音波遠隔医療診断システムに関する
研究 - 超精密位置決めシステムに関する研究
- ガラスの微細加工に関する研究
- UVレーザ加工システムに関する研究
- ウォータージェット加工システムに関する研究
- 高速工作機械の熱変形能動補償に関する研究
光石教授は2022.3.31をもって退職されました.
原田准教授とマルケス助教は新しい研究室で研究内容を引き継ぎました.
新しい研究室のHPはこちら(メンテ中)
汎用型ロボット手術支援システム(SmartArm)に関する研究
複数の大学,企業と共同して,狭小空間での手術を対象としたSmartArmと呼ばれる汎用型ロボット手術支援システムを開発した. このSmartArmロボット手術支援システムは,2台の6自由度の産業用ロボットアームと,4自由度(3自由度+把持1自由度)の繊細な動きを実現する鉗子から構成されている.
このシステムは,ImPACT Program: Bionic Humanoids Propelling New Industrial Revolution の一環として開発されたシステムである.
安全性向上のためVirtual Fixture(Vector-field-inequalities)の手術空間への応用に関する研究
SmartArmロボット手術支援システムに代表されるような汎用型手術支援システムを臨床の場で活用するには,様々な術式,状況下における安全性の担保が必須である. そこで,Vector-field-inequalities(VFI)と呼ばれる幾何的図形に基づいたVirtual Fixtureを用いて,ロボットを安全な空間へ拘束する手法を提案した. これまで様々なシステム,手術環境において,このVFIが応用可能であることを示している.
Vector-field-inequalitiesの経鼻手術への応用 (TRO 2019)
Vector-field-inequalitiesの成人,および小児を対象とした腹腔鏡手術への応用(ICRA 2019)
Vector-field-inequalitiesの深部脳神経外科への応用 (ICRA 2018)
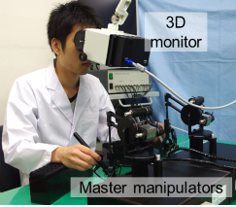
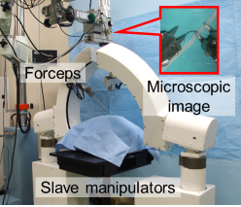
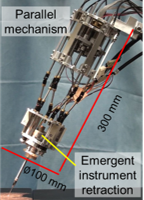
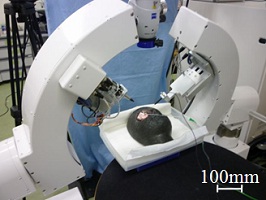
顕微鏡下脳神経外科手術用ロボティック・システムに関する研究
脳神経外科手術を対象として、微細な血管や神経の吻合を実現するマスタ・スレーブ型手術ロボティック・システムを開発した。7自由度のスレーブ・マニピュレータ2台により、マスタ・マニピュレータを操作する術者の手の動きを縮小して再現する.ロボットによる高精度の位置決め制御と、手の震え(振戦)を抑制する処理により、超繊細な動作を実現した.直径3mmの術具は脱着可能になっており、対象の手術に応じて交換することも可能である。これまでに直径0.3mmの人工血管の吻合に成功している。
また、血管吻合の自動化に向けて、顕微鏡画像上における術具や血管、縫合針の認識技術や、術中に行っている動作の認識技術の開発を行っている。デモンストレーション学習を用いて血管吻合時の軌道を学習することにより内径0.7mmの人工血管への自動刺入に成功している。
 |
 |
眼科手術用ロボティック・システムに関する研究
眼底の後部硝子体膜の剥離や新生血管の除去を対象にした網膜・硝子体手術を支援する手術ロボティック・システムの開発を行っている。脳外科手術用ロボティック・システムと共通のプラットフォームを用いており、マスタ・マニピュレータの操作量を40分の1倍にしてスレーブ・マニピュレータを動かすことで、手技を超えた手術精度をリアルタイムで達成することができる。また、豚眼(摘出眼)を用いることで、生体を模擬した実験を行っている。これまでに眼底の直径100μm程度の血管に数十μmのピペットを挿入し,薬液を注入するカニュレーションに成功している.
また、Visual Servoingを用いた水平方向の自動位置決め技術や影の検出を利用した画像の奥行方向の自動位置決め技術、眼底血管の認識技術をこれまでに開発しており、これらの技術を用いてカニュレーションの自動化を行っている。
 |
 |
 |
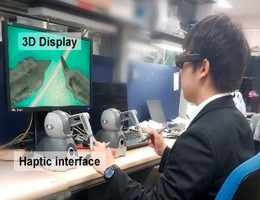
ロボット手術のバーチャルリアリティ(VR)シミュレーションに関する研究
医師のトレーニングやスキルの解析、また手術の自動化のアルゴリズムの検証を目的としてVR手術シミュレータの開発を行っている。最新の3次元コンピュータグラフィックスとリアルタイムのシミュレーション技術を組み合わせることにより没入感のある再現性の高い手術シミュレーションを実現している。シミュレータの操作インターフェースには、本研究室で開発している手術支援ロボット同様のインターフェースを用いており、力のフィードバックを行うことが可能である。これまでに、脳神経外科手術や眼科手術、またロボット手術の練習タスクとして知られるペグトランスファーのシミュレーションを開発している。
 |
人工膝関節置換術支援システムに関する研究
人工膝関節置換術では、人工関節の設置位置・姿勢が正確であることと、侵襲を最小限に抑えることが求められる。本研究では患者のCT画像などの医用画像を用いる術前計画システムと、骨切除ロボットを中心とする術中支援システムを開発しており、正確性と最小侵襲性を備えた手術システムの構築を目指している。これまでにモデルボーン、豚骨、人体の標本を用いた実験において、良好な結果を得ている。
 |
 |
顕微鏡下手術を対象とした熟練度評価システムに関する研究
顕微鏡下脳神経外科手術では、直径1 mm以下の血管を0.02 mmの手術用吻合糸を使用して吻合することもあり、極めて高度な技術が求められる。 そこで、手術用ピンセットの位置、姿勢、速度、加速度、先端での発生力を計測可能な熟練度評価システムを開発した。 これにより熟練医師のみが行うことのできる動作要素を抽出し、将来的に手術ロボットに熟練度に基づく制御を搭載することを目指す。
 |
 |
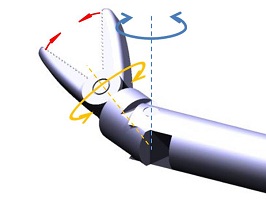
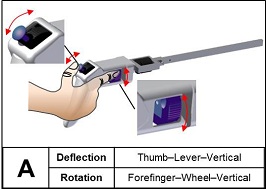
操作性を考慮した小児内視鏡下手術用多自由度術具に関する研究
内視鏡下手術は小児外科領域においても普及しているが、ワークスペースの小ささ等の小児外科特有の問題がある。そこで、狭い体腔内においても複雑な手技を実現するため、小児外科用細径多自由度術具の開発を行っている。開発した術具の直径は3.5㎜であり、超微細歯車を搭載することにより術具先端での3自由度を実現している。この術具は、術者が手で持って操作することを想定しているため、高い操作性が不可欠である。そこで、手指の動作を解析することにより、直感的に操作可能な操作部を開発している。
 |
 |
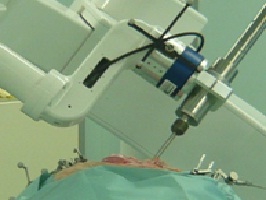
遠隔腹腔鏡下手術支援システムに関する研究
患者への負担の小さい手術として、内視鏡下手術(腹腔鏡下手術)がある。この手術は、入院期間の短縮などのメリットがある一方で、体腔内の制限された空間での作業となるため、開腹手術と比較して手術の難度が高い。そこで、医師の負担を軽減するため、直感的に操作できるマスタ・スレーブ型手術支援ロボティック・システムを開発した。医療格差の是正、救急医療への貢献、医師の移動負担の軽減を目指した遠隔手術への対応も行っており、すでに日本-タイ間,日本-韓国間での遠隔操作実験に成功している。
 |
 |
![]()