
- SmartArm: a versatile system for surgery
- Vector-field-inequalities: customizable virtual fixtures for safe surgery
- Microsurgical Robotic System for Neurosurgery
- Eye Surgical Robotic Systems
- Virtual Reality Simulation for Robotic Microsurgery
- Surgical Robotic System for Minimally Invasive Knee Arthroplasty
- Microsurgical Skill Assessment System
- Multi-DOF Surgical Instrument with Intuitive User Interface for Pediatric Laparoscopic Surgery
- Tele-operative Laparoscopic Surgical System
- Finished projects
- Non-Invasive Ultrasound Theragnostic System
- Cutting Tools for Biocompatible Bone-Cutting
- Tool Surface Functionalization Using Micro-Fabrication Technology
- Precision Machining of Hard-Brittle Material
- Evaluation of a Regenerated Cartilage Based on its Viscoelasticity
- Robot assisted reposition of bone fractures
- Robot assisted hand surgery
- Robotically-assisted tele-diagnosis for US imaging
- Miniaturized stages with high precision positioning
- Precise machining of glass
- UV laser machining
- Water jet machining
- Active compensation of thermal deformation in high-speed machine tools
Prof. Mitsuishi retired on 31 March 2022.
Associate Prof.Harada and Assistant Prof.Marinho have moved to a new laboratory and taken over some of the research topics.
The link to the new website is here (under maintenance).
SmartArm: a versatile robotic system for surgery
A versatile robotic sytem for narrow workspaces was developed in conjunction with partner universities and companies. The SmartArm robotic system has two industrial-type robotic arms and four degrees-of-freedom (DoF) dexterous tools, with a total of 9 DoF for each arm plus a gripping DoF.
The development of this robot was part of the ImPACT Program: Bionic Humanoids Propelling New Industrial Revolution.
Vector-field-inequalities: customizable virtual fixtures for safe surgery
In order to use a versatile robotic system such as the SmartArm in many different surgical procedures, we have developed a customizable virtual fixture technique based on geometrical primitives. We have tested this techinque in many scenarios and with different robotic systems.
Dynamic active constraints using vector-field-inequalities applied to endonasal surgery (TRO 2019)
Vector-field-inequalities applied to adult and pediatric laparoscopy (ICRA 2019)
Vector-field-inequalities applied to deep neuro surgery (ICRA 2018)
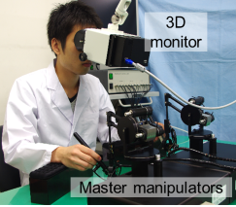
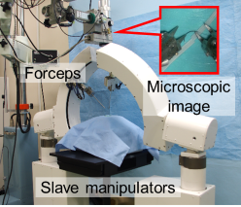
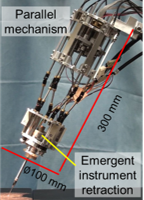
Microsurgical Robotic System for Neurosurgery
A master-slave surgical robotic system capable of suturing small vessels or nerves in the brain has been developed. The robotic system includes two slave manipulators each with 7 DOFs which can be remotely operated by a surgeon using the master manipulators. Thanks to high positioning accuracy, tremor filtering and motion scaling capability, the system is able to perform the elaborate surgical operations required in neurosurgery. The robotic forceps of 3 mm diameter can be easily interchanged according to required surgical tasks. We successfully performed the anastomosis of artificial blood vessels of 0.3mm in diameter.
We have also worked on environment recogntion and step recognition toward automation of robotic anastomosis. By learning human demonstrations, we automated needle insertion to artificial blood vessels with 0.7 mm inner diameter.
 |
 |
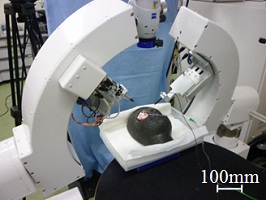
Eye Surgical Robotic Systems
Microsurgical robotic systems for eye surgery, namely vitreoretinal surgery, have been developed. One of the developed platforms (shown in the right figure) shares the same robotic platform as the neurosurgical robotic system, but it is equipped with eye surgical robotic instruments and operated with the motion scaling of 1/40. This robotic vitreoretinal surgical system showed superior operability compared to traditional manual procedures and demonstrated sufficient potential to warrant further testing in animal trials to assess clinical feasibility.
Toward autonomous vitreoretinal surgery, autonomous positioning and retinal blood vessel recognition have also been developed. Micro-cannulation was automated based on these technologies.
 |
 |
 |
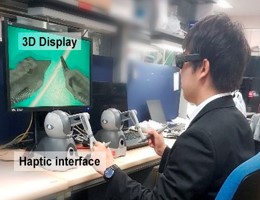
Virtual Reality Simulation for Robotic Microsurgery
We work in the development of software-based surgical simulators. We use real-time simulation methods, as well as advanced 3D computer graphics, to provide interactivity with both physical and visual realism. To imitate a master-slave scenario we employ haptic devices as user input and for providing force feedback to enhance immersivity. The virtual reality simulations are applied for testing automation algorithms inside a controlled virtual environment, for surgical training, and for the analysis of surgical skills. We have succeeded in the development of surgical simulators for micro neurosurgery and eye vitreoretinal surgery.
 |
Surgical Robotic System for Minimally Invasive Knee Arthroplasty
Precise positioning of the artificial knee joints onto the machined bone surfaces is crucial in knee arthroplasty, and highly-precise bone cutting needs to be performed through a small incision for minimal invasiveness. To achieve these requirements, a pre-operative planning system using CT images and an intra-operative system involving the Bone Cutting Robot has been developed. Experiments using artificial bones, swine bones, and cadaver bones have shown excellent performance by the system.
 |
 |
Microsurgical Skill Assessment System
High skill levels are required in microsurgical neurosurgery as the surgeon has to anastomose vessels of 1 mm or smaller using 0.02 mm surgical sutures. We have been developing a microsurgical skill assessment system using tweezers equipped with infrared optical makers for position tracking, an inertial measurement unit for acceleration measurement, and strain gauges for force sensing. The data obtained using the system is being analyzed to extract motion elements unique to skilled surgeons for further development of skill-based control of surgical robots.
 |
 |
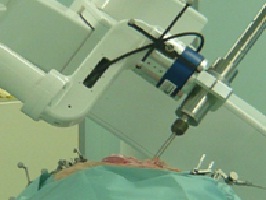
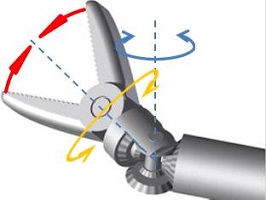
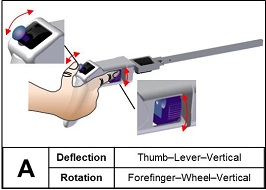
Multi-DOF Surgical Instrument with Intuitive User Interface for Pediatric Laparoscopic Surgery
Pediatric laparoscopy is difficult due to the very small working space available in the abdominal cavity of a child. Surgeons are restricted by this constraint, in addition to the problems inherent in laparoscopic surgery. Therefore, we have been developing a handheld multi-DOF surgical instrument to perform complicated surgical tasks in a small space. The diameter of the instrument is 3.5 mm and equipped with 3 DOFs facilitated by the triple-bevel-gear mechanism. In addition, an intuitive user interface has been proposed for the 3-DOF handheld forceps.
 |
 |
Tele-operative Laparoscopic Surgical System
Minimally invasive surgery, specifically laparoscopic surgery, requires a shorter hospital stay compared to conventional open surgery, and thus benefits patients. Meanwhile, surgeons experience difficulties maneuvering long, thin instruments inserted through keyholes in the abdomen. Therefore, a master- slave surgical robotic system has been developed to assist in laparoscopic surgery. A tele-surgical operation between Japan and Thailand has been successfully demonstrated.
 |
 |